Disruptive Technology丨Figure AI: Pushing Humanoid Robotics to New Technological Frontiers

Among the application scenarios for general‑purpose humanoid robots, “tidying up the living room” has long been considered an extremely challenging task.
Unlike structured commercial or industrial environments, the living room is a highly dynamic, unstructured, and disorganized space: objects are scattered randomly, the navigable space between pieces of furniture is narrow, and there are soft, physically unpredictable items such as towels and cushion pillows.
However, following last month’s successful demonstration of kitchen cleaning, the US‑based star robotics startup Figure AI has reached another technological milestone.
Its humanoid robot, powered by the latest Helix 02 visual‑motor foundation model, has successfully performed a long‑horizon, highly complex autonomous living‑room tidying task.
This demonstration even caught the close attention of Elon Musk. When Musk asked whether the operation was fully autonomous or remotely teleoperated, Figure AI founder Brett Adcock gave a clear answer: Fully Autonomous.

01 Core Driver: End‑to‑End Architecture and a Single Neural Network
The key to this breakthrough lies in the deep integration of the hardware platform (Figure 03) and the AI brain (Helix 02).
Traditional robots performing complex tasks often require engineers to write dedicated control algorithms and state machines for each individual action, such as grasping, walking, and placing.
Helix 02, by contrast, adopts a single neural‑network system that directly achieves end‑to‑end mapping from “pixels (visual input) to actions (joint control).”
According to disclosed information, the model is trained on large amounts of human motion data, allowing it to learn environment interaction strategies directly from data.
The system no longer relies on hard‑coded special‑case logic; instead, through purely data‑driven learning, it seamlessly integrates mobility, perception, and dexterous manipulation.

02 Validation of Key Technical Capabilities
In the newly released demonstration, Helix 02 exhibited remarkable generalization ability achieved solely through data scaling, without adding new algorithms:
Tool coordination and force control: The robot smoothly used a spray bottle held in its left hand to moisten the table, while simultaneously wiping with downward pressure using a towel in its right hand, demonstrating excellent force control and bimanual coordination.
Dynamic handling of soft objects: For highly variable soft materials (e.g., towels), the robot was able to remove a towel from its arm, adjust its cleaning posture, and even fling it over its shoulder to free both hands – a complex physical interaction.
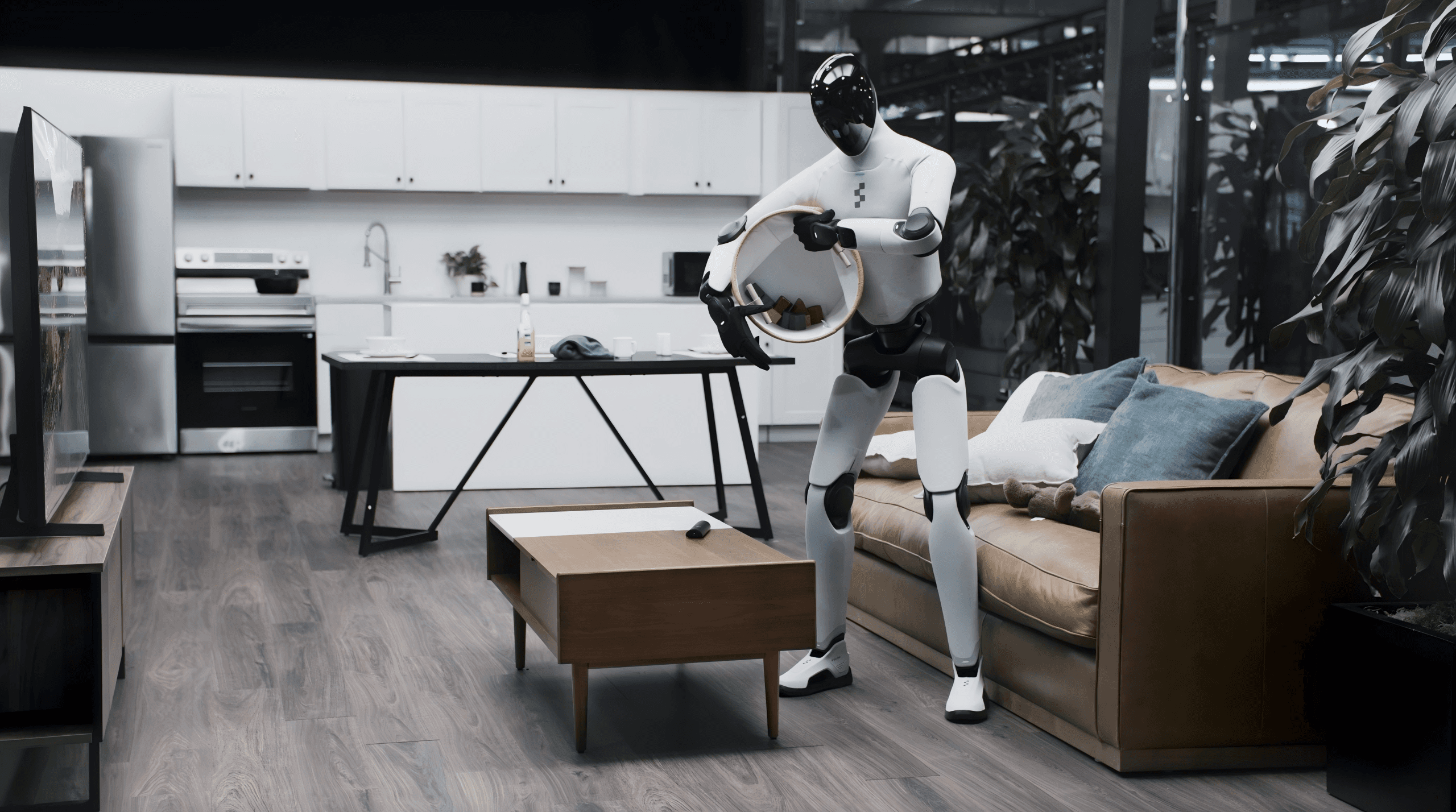
Complex bimanual concurrent manipulation: While holding a storage bin steady with both hands, the robot used one of its hands to sweep loose building blocks on the table into the bin – breaking away from mechanical alternating action logic.
Whole‑body coordination: The robot employed human‑like body resource scheduling strategies, such as tucking a storage bin under its armpit to free both hands for picking up other items, greatly improving task efficiency.
High‑dynamic motion execution: With a fast yet controlled throwing motion, the robot accurately tossed a cushion pillow back onto the sofa, demonstrating dynamic operation capabilities beyond slow, cautious movements.
In‑hand redirection within a dexterous hand: After grasping a remote control, the robot used its dexterous hand to adjust the object’s orientation in‑palm and precisely press a specific button to turn off the TV.
Mobile manipulation: The system perfectly solved a well‑known industry challenge – navigating sideways through the extremely narrow gap between a coffee table and a sofa while stably performing pick‑and‑place tasks with its upper body.
03 Industry Significance: Toward Scalable General Intelligence
The living‑room tidying task deeply integrates robot mobility, dexterous manipulation, tool use, and real‑time path planning.
The success of Figure AI and Helix 02 validates the feasibility of a general‑purpose architecture in the complex physical world.
It demonstrates that the system does not need customized controllers for every behavior; instead, solutions can emerge directly from data.
As training data grows exponentially, Helix 02’s skill repertoire will continue to expand.
This marks a critical step toward scalability in embodied AI – in the future, simply by having a single model “observe” and learn from more real‑world examples, general‑purpose humanoid robots are expected to be capable of handling all kinds of tasks in both household and commercial scenarios.


